湿法制粒線(xiàn)在線(xiàn)检测技(jì )术的应用(yòng)场景和实验数据

翰林湿法制粒線(xiàn)
1.制粒设备终点判定原理(lǐ)
⑴ 近红外检测水分(fēn)和粒度的工(gōng)作(zuò)原理(lǐ)
近红外检测水分(fēn)的原理(lǐ):近红外光谱主要是由于分(fēn)子振动的非谐振性使分(fēn)子振动从基态向高能(néng)级跃迁时产(chǎn)生的,具(jù)有(yǒu)较强的穿透能(néng)力。近红外光主要是对含氢基团X-H(X=C、N、O、S)振动的倍频和合频吸收。由于水分(fēn)子中(zhōng)含有(yǒu)O-H,会吸收特定波長(cháng)的近红外光。在特定波長(cháng)下,反射回去的近红外能(néng)量与物(wù)料中(zhōng)水分(fēn)子吸收的近红外能(néng)量成反比,即物(wù)料中(zhōng)的水分(fēn)含量越高,反射回去的能(néng)量就越低。近红外检测粒径的原理(lǐ):样品粒度的差异直接影响样品对近红外光的吸收和散射,从而导致光谱的变异。相同组分(fēn)的样本,随着颗粒度的增加,吸光度会增加。物(wù)料在制粒过程中(zhōng)粒度会逐渐增大,其光學(xué)表面粗糙,影响反射光谱。根据光谱的变化和检测的粒径分(fēn)布,应用(yòng)化學(xué)计量學(xué)建立粒度分(fēn)布定量分(fēn)析模型,对制粒过程中(zhōng)的粒度变化进行实时检测。
⑵ 流化床终点判定的工(gōng)作(zuò)原理(lǐ):
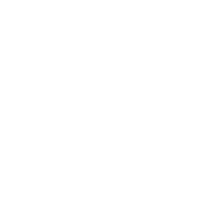
流化床制粒共分(fēn)為(wèi)三个阶段,混合、制粒、干燥。分(fēn)别对着三个阶段进行样品采集,样品采集的同时检测光谱。以粒径,水分(fēn)含量為(wèi)考查指标,建立近红外光谱与物(wù)料(粒径、含水量)的相关性,并通过数學(xué)处理(lǐ)方案进行数据拟合分(fēn)析并建立数學(xué)模型。
通过多(duō)批次的物(wù)料验证,证明模型的预测值与实际值的误差符合要求。从而证明该模型适用(yòng)于该品种物(wù)料。原则上,前期收集的数据越多(duō),模型曲線(xiàn)越连续,越准确。
流化床顶喷制粒建模流程
⑶ 湿法制粒机的终点判定(水分(fēn),颗粒收率)
湿法制粒分(fēn)為(wèi)混合阶段、吸水阶段、形成粘體(tǐ)桥阶段、形成毛细管阶段、形成团块、液化阶段,形成毛细管阶段和形成团块阶段时物(wù)料含水量约為(wèi)25%,如果水分(fēn)高于这个阶段,那制粒效果就不好。
制粒目的提高药物(wù)的流动性,减少粉尘,颗粒得率是评价制粒颗好坏的一个直接指标,颗粒得率高低直接反映了制粒成功与否,颗粒得率越高工(gōng)艺参数越合理(lǐ)。
⑷ 湿法制粒终点判定的原理(lǐ):
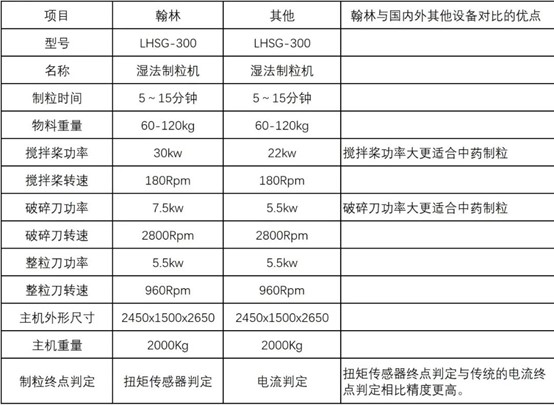
随着粘合剂的加入,粒径不断增大,同时粘合剂和物(wù)料的混合均匀度也在不断趋于均匀,当达到某一个需要的值时候,反映出来的就是其搅拌桨的功率值在相对小(xiǎo)的一个范围内,功率可(kě)换算成電(diàn)流或者扭力,这样应该可(kě)以通过扭力或者電(diàn)流来控制粘合剂的加入量和制粒的时间(颗粒的大小(xiǎo))。在制粒过程中(zhōng)把近红外技(jì )术也结合进来,假如加入粘合剂量為(wèi)一个定值,那我们就可(kě)以把物(wù)料性质(zhì)的变化(物(wù)料含水量均匀性和颗粒均匀性)和扭矩、近红外光谱建立起对应的关系,从而建立模型,依靠模型来实现终点判定。
湿法制粒共分(fēn)為(wèi)三个阶段,干混合、加入粘合剂制软材,出料整粒。分(fēn)别对前两个阶段进行样品采集,样品采集的同时检测近红外光谱,检测搅拌主轴扭矩。以物(wù)料含水量,颗粒得率為(wèi)考查指标,建立近红外光谱和搅拌扭矩值与物(wù)料(颗粒得率、含水量)的相关性,并通过数學(xué)处理(lǐ)方法进行数据拟合分(fēn)析并建立数學(xué)模型。

湿法制粒过程
2.带终点判定功能(néng)湿法制粒机的结构
● 带终点判定的湿法制粒机结构图
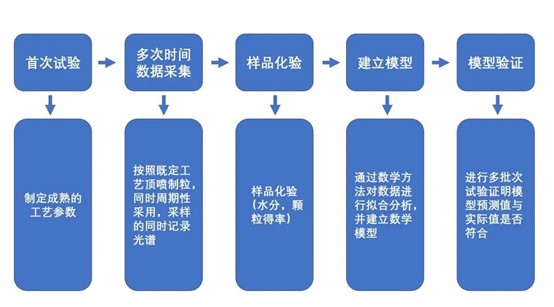
根据中(zhōng)药提取物(wù)粘性强,流动性差等特点,针对目前高剪切制粒对中(zhōng)药提取物(wù)适宜性差、智能(néng)化程度低、在線(xiàn)检测功能(néng)缺失的问题,设计出如下高剪切制粒机图纸,具(jù)體(tǐ)见下图
湿法制粒机结构图
该设备主要由6部分(fēn)组成,如上图所示:
1、制粒刀(dāo)组件 2、制粒锅 3、锅盖组件 4、出料系统 5、搅拌系统 6、整粒系统
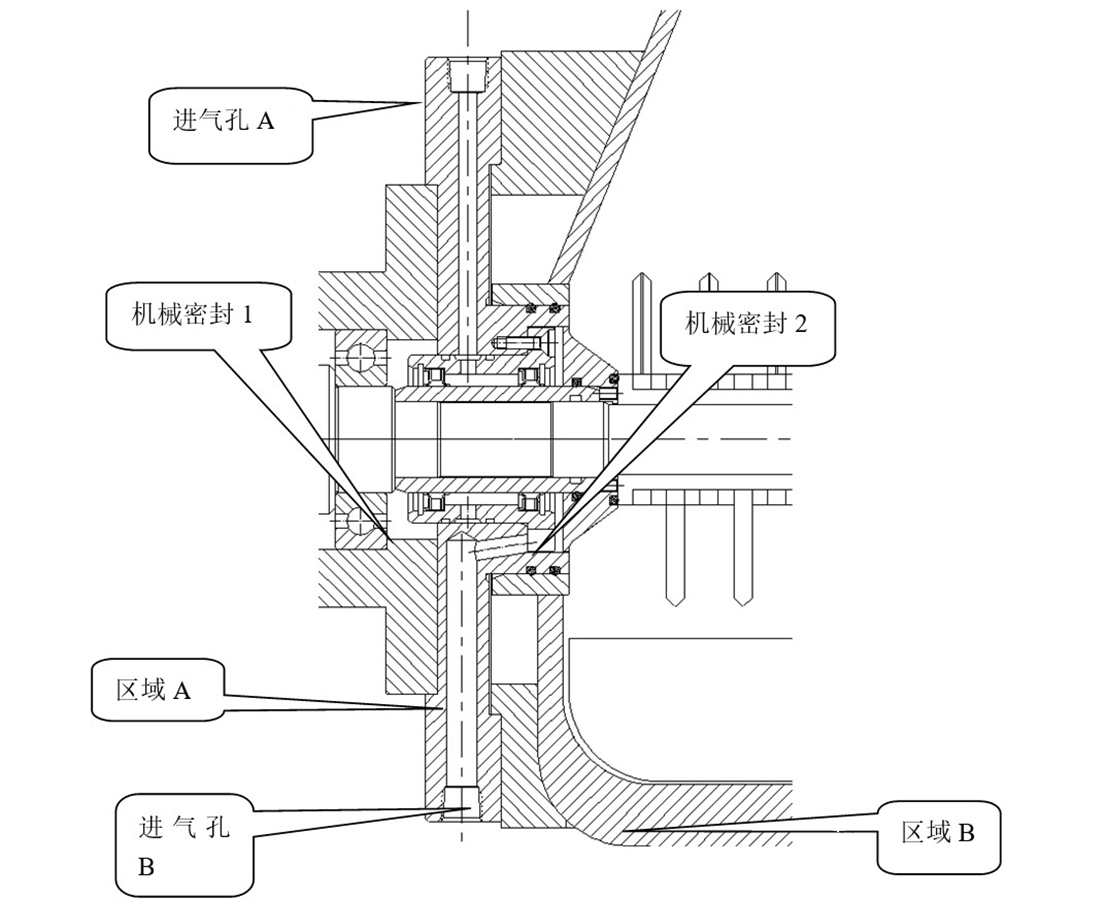
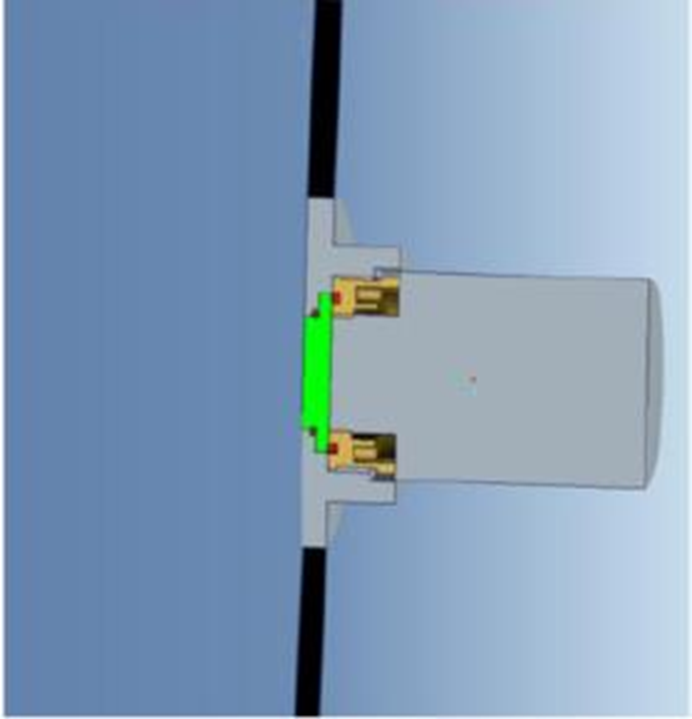
密封结构图
由图可(kě)知,进气孔A是一路用(yòng)于密封检测的压缩空气,在机械密封1和机械密封2之间通入压缩空气,在密封正常的情况下进气孔A的压缩空气流量变化范围很(hěn)小(xiǎo)的,但是当机械密封1和机械密封2任意一道密封损坏时,进气孔A的压缩空气流量就会突然增加,可(kě)以通过检测这个流量的变化来判断密封是否损坏。同时區(qū)域A也形成了一道正压缓冲區(qū),这个缓冲區(qū)可(kě)以将机械密封1和机械密封2相应侧的污染源隔开,防止在制粒过程中(zhōng)因机械密封损坏造成交叉污染。
进气孔B是旋转轴吹气體(tǐ),它使區(qū)域B相对于區(qū)域C形成正压,防止粉尘进入區(qū)域B。同时在清洗过程中(zhōng)进气孔B也可(kě)进水,对區(qū)域B进行清洗,清洗完成之后通过压缩空气吹扫将區(qū)域B中(zhōng)的残留水清除。
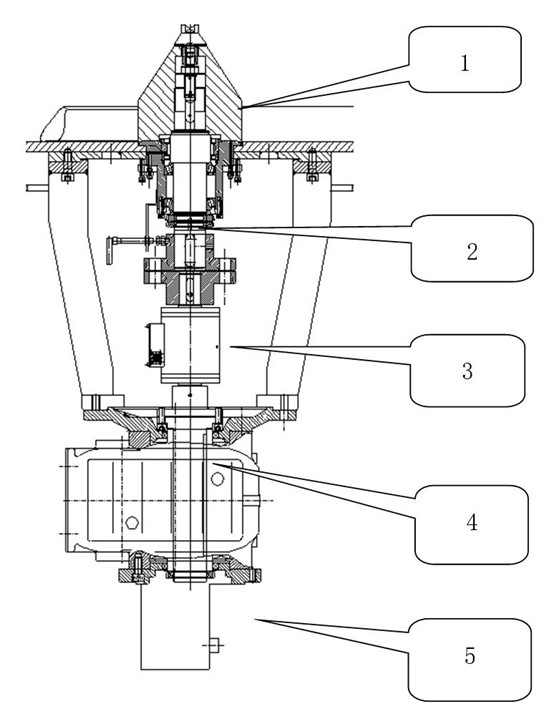
搅拌桨传动结构
搅拌系统主要由以上5部分(fēn)组成:
1、搅拌桨 2、驱动轴 3、联轴器 4、扭矩传感器 5、减速机
在搅拌轴上直接安(ān)装(zhuāng)了扭矩传感器,扭矩传感器直接测制粒过程中(zhōng)物(wù)料施加在搅拌桨上的阻力,受外界干扰小(xiǎo),灵敏度高,重现性好。
3.带终点判定功能(néng)流化床的结构
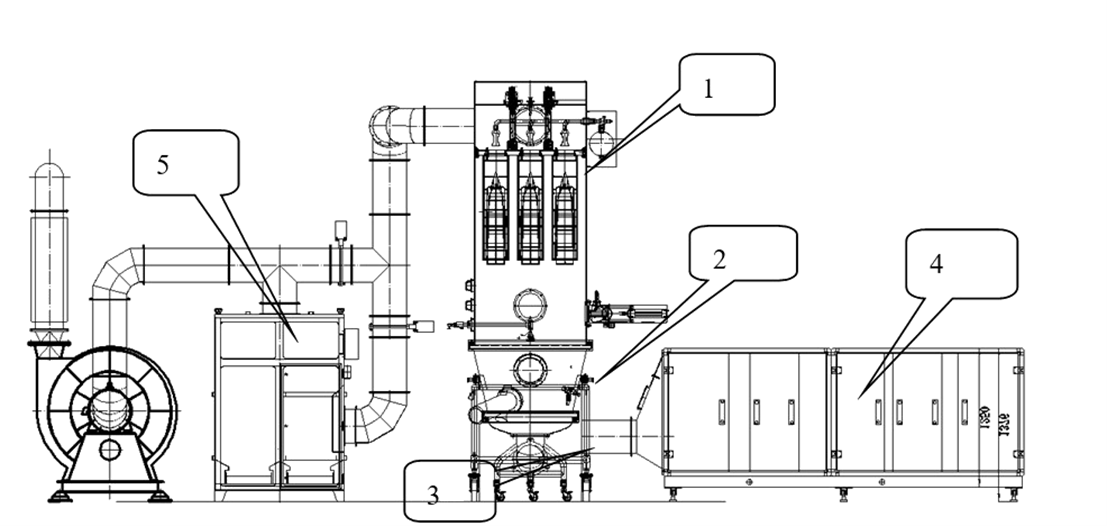
带终点判定的流化床结构图
本项目需研发的带终点判定的流化床设备,一共分(fēn)為(wèi)5个组件,分(fēn)别是:1、顶仓 2、物(wù)料仓 3、可(kě)移动底仓 4、进风处理(lǐ)单元部分(fēn) 5、排风系统
● 近红外光谱仪安(ān)装(zhuāng)位置的设计与取样器的设计
流化床终点判定是需要建立物(wù)料特性和近红外光谱的对应模型的,所以就需要设计一个专门的取样口,在采集光谱的同时将物(wù)料在3秒(miǎo)内取出。近红外光谱仪的安(ān)装(zhuāng)位置要保证镜头使用(yòng)可(kě)以接触到物(wù)料。取样机构的安(ān)装(zhuāng)位置尽可(kě)能(néng)靠近于近红外镜头,确保取出的样品与近红外设备检测的样品最為(wèi)接近。
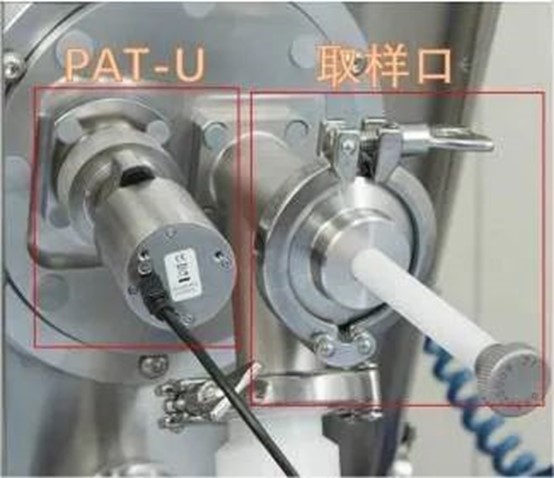
近红外光谱仪与取样器安(ān)装(zhuāng)位置图
近红外与料仓齐平安(ān)装(zhuāng)图
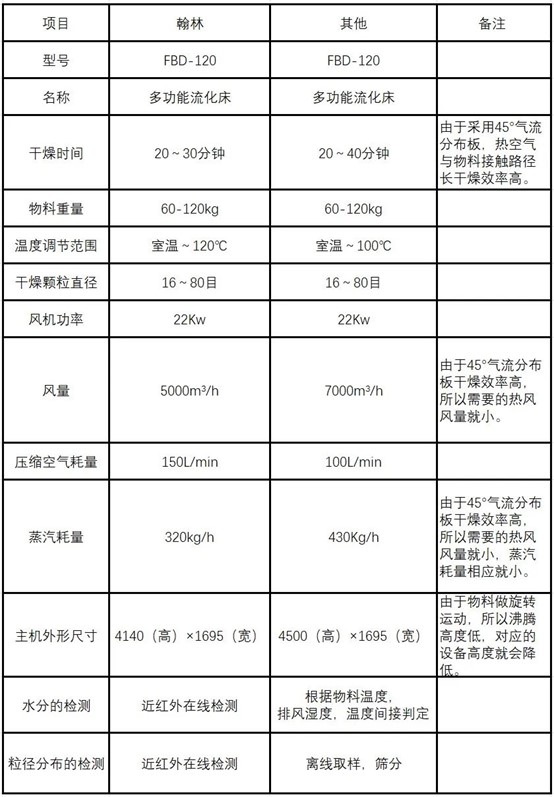
4.带终点判定技(jì )术的制粒与流化床设备性能(néng)指标
流化床指标
湿法制粒机指标